Deberá poder establecer la velocidad de giro en un rango que va de -100% a +100% del regimen máximo de giro del motor, así como la aceleración y deceleración del eje, que deberán poder variar en un rango de 1 (lento) a 10 (rápido).
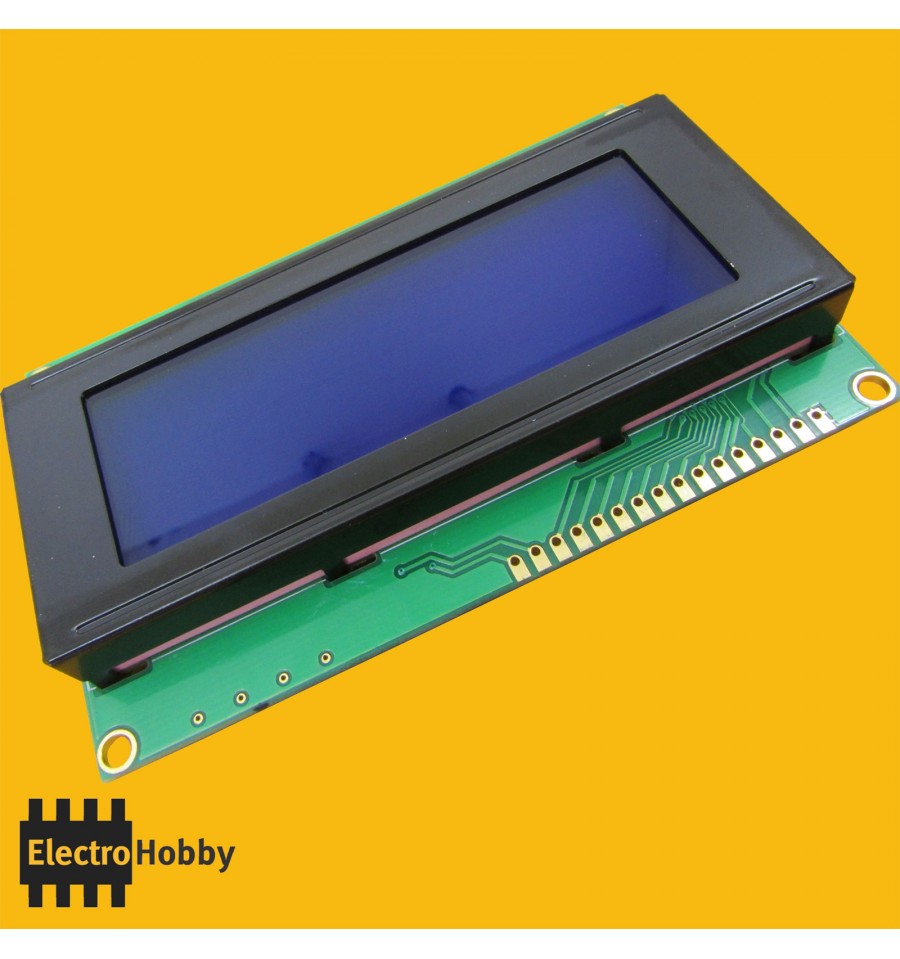
Deberá poder ser controlado mediante un teclado y un display de cristal
líquido (LCD) incorporados al sistema. En el display se deberá reflejar
tanto los parámetros objetivo (velocidad y aceleración), como la
velocidad de giro.
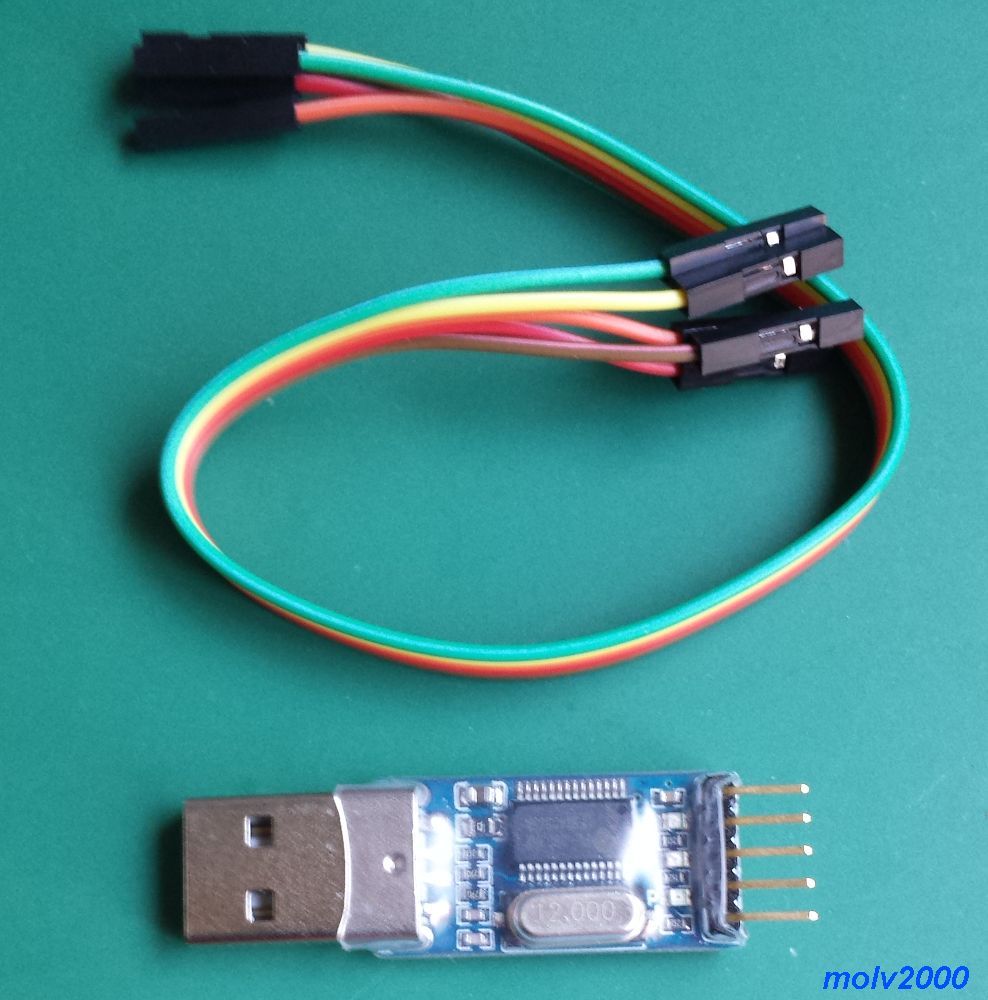
También deberá poder ser controlado externamente mediante un terminal (HyperTerminal, PuTTY, ...) conectado a un interfaz serie RS-232.
La respuesta obtenida mediante ambos sistemas de control deberá ser semejante.
La respuesta por medio del puerto serie deberá cumplir los siguientes requisitos:
La velocidad y sentido de giro del eje también podrá ser controlada mediante un potenciómetro, en cuyo caso el display debe reflejar la posición del potenciómetro y la velocidad del eje del motor.
Deberán estar disponibles los siguientes comandos:
La gestión del módulo de cristal líquido LCD forma parte del desarrollo de la práctica, para lo cual se deberán programar las funciones necesarias para su configuración y uso. No se podrá usar ninguna librería ya escrita. En caso de ser necesario, podrá usarse la librería Wire
Asi mismo, la gestión del interfaz RS-232 también forma parte de la práctica, por lo que se deberán programar las funciones necesarias para su configuración (de acuerdo con las instrucciones del usuario) y para la transmisión y recepción de los datos. Tampoco en este caso se podrán utilizar librerías ya escritas, en particular las funciones Serial() y Serial1() del sistema Arduino.
El movimiento del servo deberá gestionarse imperativamente mediante una seńal PWM generada por temporizadores del microcontrolador. No se podrá usar ninguna librería ya escrita.
Name Last modified Size Description
Parent Directory -
HowtouseLCD1.pdf 21-Oct-2012 19:17 241K
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}